







Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

고객의 측정이 필요합니다
1. 어셈블리 및 전달 검사 중 스캐너의 트랙 평탄도 검사;4. 어셈블리 및 전달 검사 중 스캐너의 두 축의 동축성 검사;

그림 1 :이 경우 라디안 레이저 추적기 사용
이 경우 라디안 레이저 추적기 사용
도 1에 도시 된 바와 같이, 사용될 때, 스캐닝 시스템 스핀들의 트래커 대상 공 (SMR)을 고정하면 라디안 레이저 트래커 호스트는 레이저를 쏘아 SMR의 구형 중심을 잠그고 추적한다. 연산자는 명령을 입력하여 주어진 방향으로 스캐닝 시스템 스핀들이 움직이고 짧은 시간 동안 측정 할 위치를 유지합니다. 스핀들이 안정되면, 라디안 레이저 트래커는 획득 속도로 측정 할 지점의 3D 좌표를 정확하게 수집하여 기록 및 저장을 위해 측정 소프트웨어로 전송합니다. 이러한 3D 포인트가 여러 차례 수집 된 후, 해당 라인, 표면 및 본체는 각 지점의 위치에 따라 소프트웨어에서 형성 될 수 있으며, 해당 형태 및 위치 공차 데이터는 계산되고 주 샤프트의 이론적 위치와 비교할 수 있습니다. 측정 및 탐지의 목적을 달성하기 위해.

그림 2 : 전-자극 C-Scan 초음파 테스트 시스템의 개략도와 측정 할 축
작동 단계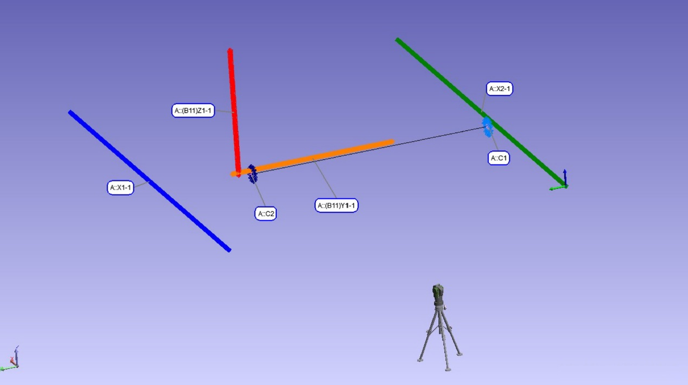
그림 3 : 가이드 레일 병렬 처리 조정 다이어그램
2) 그림 4에 표시된 것처럼 x, y 및 z 축의 직선을 측정하고 편차 조정 및 설치를 위해 편차 값을 제공합니다.
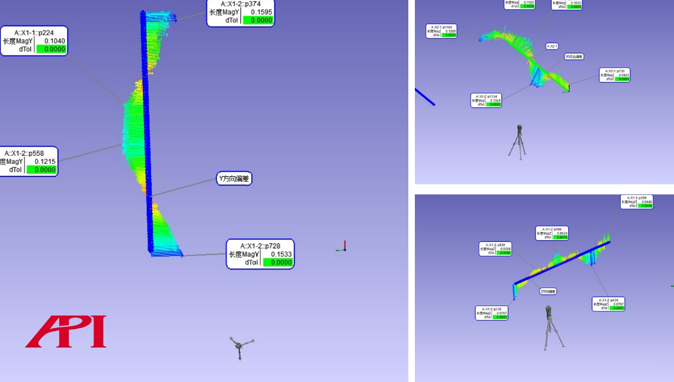
그림 4 : 실제 측정 후 소프트웨어에서 각 축의 직선 편차 개략도
3)도 5에 도시 된 바와 같이, x, y 및 z 축의 수직 성을 분석한다.
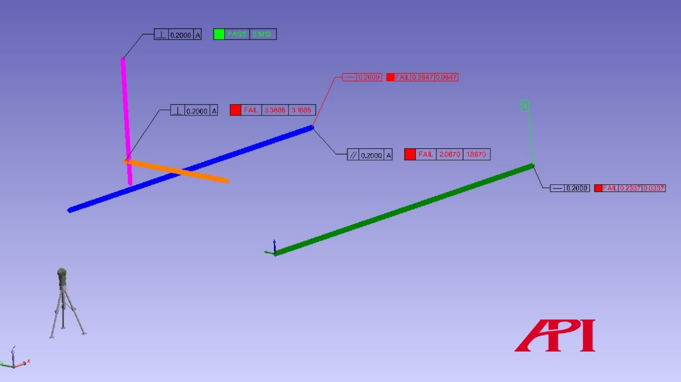
그림 5 : X, Y 및 Z 축 수직 데이터 분석의 도식 다이어그램
4)도 6에 도시 된 바와 같이, 두 축 사이의 동축성은 A 및 B 축 조정 전에 매우 열악하다. 두 축의 동축성은 상단 및 하부 고도 차이를 조정 한 후 정확도 요구 사항을 충족 할 수 있으며 전면 및 후면 간격은 레이저 추적 측정 데이터에 의해 제공됩니다.
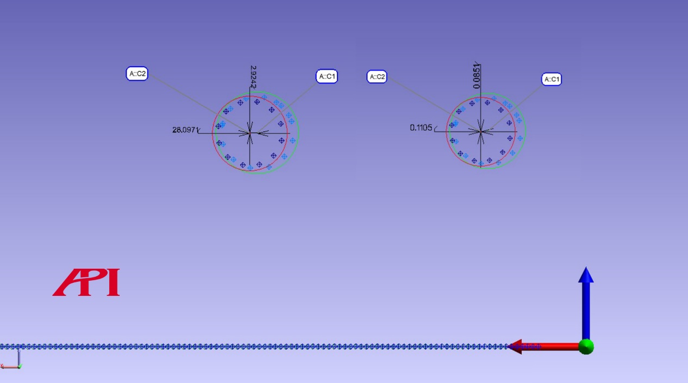
그림 6 : 축 A 및 B의 정렬 조정 전후의 동축 데이터 비교 (왼쪽 : 조정 전; 오른쪽 : 조정 후)
결론
이 사례는 정확도, 이식성 및 빠른 데이터 수집 속도를 갖춘 Radian Laser 추적기가 탐지 및 보정의 모든 측면에서 초음파 스캐닝 시스템의 측정 요구 사항을 완전히 충족 할 수 있으며 정확하고 효율적이며 사용자 다운 타임을 효과적으로 감소시킬 수 있음을 보여줍니다. .
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.